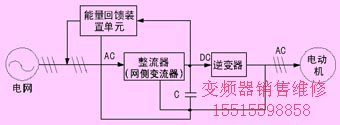
眾所周知,一般通用變頻器其橋式整流電路是三相不可控的,因此無法實現(xiàn)直流回路與電源間雙向能量傳遞,解決這個問題的比較有效方法是采用有源逆變技術(shù),整流器部分采用可逆整流器,又叫網(wǎng)側(cè)變流器。通過對網(wǎng)側(cè)變流器的控制將再生電能逆變?yōu)榕c電網(wǎng)同頻率電網(wǎng)同頻率、同相位的交流電回饋電網(wǎng),從而實現(xiàn)制動。以前有源逆變單元主要采用晶閘管電路,這種電路只有在不易發(fā)生故障的穩(wěn)定電網(wǎng)電壓下(電網(wǎng)電壓波動不大于10%),變流器才能安全地進(jìn)行回饋運(yùn)行。這種電路只有在不易發(fā)生故障的穩(wěn)定電網(wǎng)電壓下(電網(wǎng)電壓波動不大于10%),變流器才能安全地進(jìn)行回饋運(yùn)行。因為在發(fā)電制動運(yùn)行時,電網(wǎng)電壓制動時間大于2ms,則可能發(fā)生換相失敗,損壞器件。另外,本方式在深控時,功率因數(shù)低、諧波含量高、換相重疊將引起電網(wǎng)電壓波形畸變。同時控制復(fù)雜,成本較高。隨著全控型器件的實用化,人們又研究出斬控式可逆變流器,采用pwm控制方式。這樣網(wǎng)側(cè)變流器的結(jié)構(gòu)與逆變器的結(jié)構(gòu)完全相同,都采用pwm控制方式。
從以上分析可知,要真正實現(xiàn)變頻器的能量回饋制動,關(guān)鍵是對網(wǎng)側(cè)變流器的控制。下文重點闡述網(wǎng)側(cè)變流器采用全控器件、pwm控制方式的控制算法。
(歡迎來電咨詢 鄭州變頻器 網(wǎng)址:m.cntjjp.com.cn 電話:0371- 56700815 手機(jī):15515598858 )
3 控制算法
網(wǎng)側(cè)變流器的控制算法通常采用如圖2所示的矢量控制算法,圖2中vdc、v*dc、△vdc分別表示直流母線電壓的測量值、給定值和控制誤差;id、i*d、△id分別表示網(wǎng)側(cè)逆變器d軸的測量值、給定值和控制誤差; iq、i*q、△iq分別表示網(wǎng)側(cè)變流器q軸電流的測量值、給定值和控制誤差;△v*d、v*d、v*q分別表示網(wǎng)側(cè)變流器的d軸輸出電壓偏差給定值、d軸輸出電壓給定值和q軸輸出電壓給定值;eabc、v*abc、iabc分別表示電網(wǎng)電勢、網(wǎng)側(cè)變流器輸出電壓的瞬時給定值和輸出電流的三相瞬時值;e、φ分別表示電網(wǎng)電勢的幅值和相位。
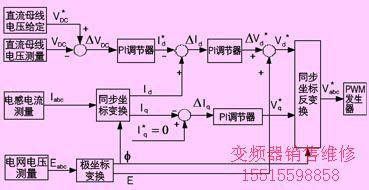
圖2 能量回饋變頻器網(wǎng)側(cè)變流器矢量控制算法框圖
矢量控制算法將實測的直流母線電壓與給定值之差,通過pi調(diào)節(jié)器,得到d軸電流的給定值;然后根據(jù)測量到的電網(wǎng)電壓的相位,對實測的網(wǎng)側(cè)變流器輸出電流進(jìn)行同步坐標(biāo)變換,得到d軸電流和q軸電流的實測值,對其進(jìn)行pi調(diào)節(jié)后將d軸量與電網(wǎng)電壓幅值相加,得到d軸電壓和q軸電壓的給定值,經(jīng)過同步坐標(biāo)反變換后輸出。
這種算法的優(yōu)點是控制精度高,動態(tài)響應(yīng)好;缺點是控制算法中坐標(biāo)變換較多,算法較復(fù)雜,對控制處理器計算能力要求較高。
控制系統(tǒng)處理器計算能力較低的設(shè)備也可以采用簡化的電流控制算法,如圖3所示。
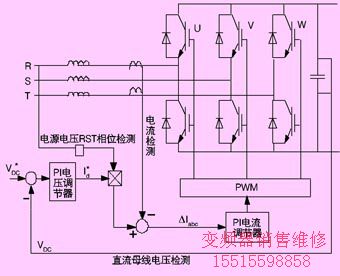
圖3 能量回饋變頻器網(wǎng)側(cè)變流器的電流控制算法框圖
從圖3可知,它采用了電流追蹤型pwm整流器組成方式。這種簡化的算法直接將d軸電流給定值與用測量到的電網(wǎng)電壓相位查表得到的三相正弦基準(zhǔn)值相乘,得到三相輸出電流的給定值,然后進(jìn)行簡單的pi調(diào)節(jié)得到三相輸出電壓的給定值并輸出。由于該算法略去了坐標(biāo)變換的計算,因而對控制處理器的計算能力要求較低。另一方面,由于pi調(diào)節(jié)器本身的特性決定了其對交流量的控制存在一定的穩(wěn)態(tài)誤差,因此這種算法的功率因數(shù)低于標(biāo)準(zhǔn)矢量控制算法。在動態(tài)過程中,直流母線電壓的波動相對較大,快速動態(tài)過程中發(fā)生直流母線壓等故障的概率相對較高。
4 回饋制動特點
嚴(yán)格地講,不能簡單地把網(wǎng)側(cè)變流器稱為“整流器”,因為它既可以作為整流器工作,又可以作為逆變器工作。由于采用了自關(guān)斷器件,通過恰當(dāng)?shù)膒wm模式,可對交流電流的大小和相位進(jìn)行控制,使輸入電流接近正弦波,并使系統(tǒng)的功率因數(shù)總是接近于1。當(dāng)電動機(jī)減速制動從逆變器返回的再生功率使直流電壓升高時,可以使交流輸入電流的相位與電源電壓相位相反,以實現(xiàn)再生運(yùn)行,并將再生功率回饋到交流電網(wǎng)去,系統(tǒng)仍能將直流電壓保持在給定值上。這種情況下,網(wǎng)側(cè)變流器工作在有源逆變狀態(tài)。這樣就容易實現(xiàn)功率的雙向流動,且具有很快的動態(tài)響應(yīng)速度,同時這樣的拓?fù)浣Y(jié)構(gòu)使得系統(tǒng)能夠完全控制交流側(cè)和直流側(cè)之間的無功和有功功率的交換,且效率可高達(dá)97%,經(jīng)濟(jì)效益較大,熱損耗為能耗制動的1%,同時不污染電網(wǎng),功率因數(shù)約等于1,具有綠色環(huán)保的特點。所以,回饋制動可廣泛應(yīng)用于pwm交流傳動的能量回饋制動場合的節(jié)能運(yùn)行,特別適用于需要頻繁制動的場合,電動機(jī)的功率也較大,這時節(jié)電效果明顯,按運(yùn)行的工況條件不同,平均約有20%的省電效果。實現(xiàn)回饋控制的唯一不足是控制系統(tǒng)結(jié)構(gòu)復(fù)雜。
5 結(jié)束語
綜上所述,可以看出能量回饋系統(tǒng)裝置具有的優(yōu)越性遠(yuǎn)勝過能耗制動和直流制動,采用回饋制動將再生電能回饋電網(wǎng),則能達(dá)到降低能耗和節(jié)約電費(fèi)的效果,因此在目前國內(nèi)各地由于經(jīng)濟(jì)高速發(fā)展而紛紛鬧電荒的時候,推廣和應(yīng)用回饋制動器,具有重要的節(jié)能意義。所以近年來不少單位結(jié)合使用設(shè)備的特點,紛紛提出配置能量回饋裝置的要求,但原來國外僅有abb 、西門子等為數(shù)不多的公司能提供產(chǎn)品,國內(nèi)幾乎空白。所以加快國內(nèi)相關(guān)產(chǎn)品的研發(fā)和生產(chǎn)具有重大的現(xiàn)實意義。